2020/05/27掲載 検証場所:京都府南丹市
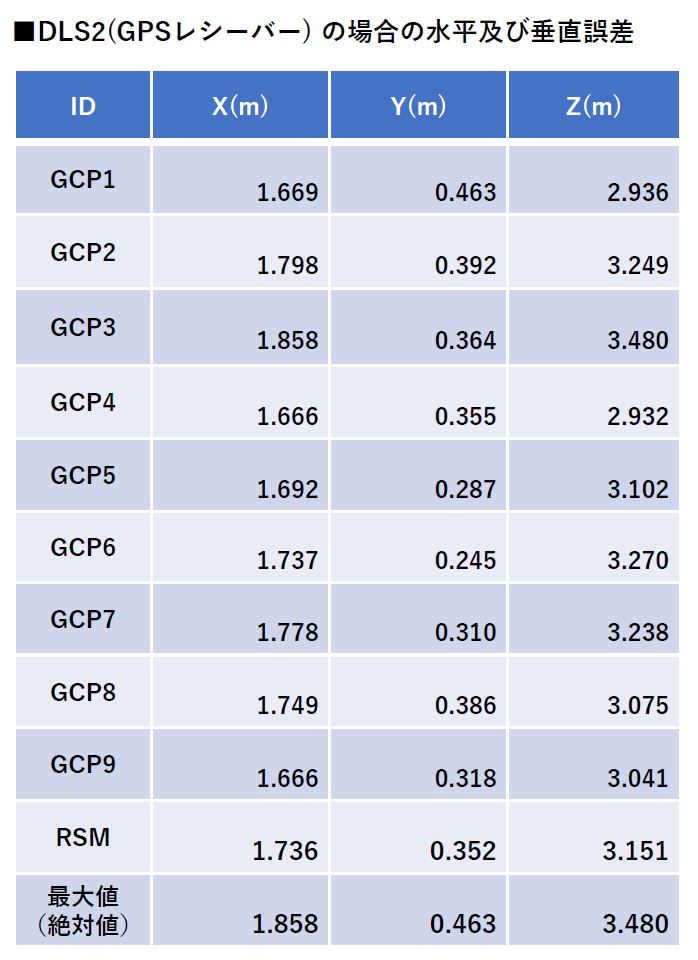
DLS2(GPSレシーバー)のみの場合の水平及び垂直誤差
• 右表は、地上分解能3cm/pixelの高度で飛行させ、DLS2を使用して取得したGPSを用いて、Pix4DでSfM処理した際の検証 点と測定値の較差を示す。
• 処理を行った段階でX方向に最大約1.85m Y方向に最大約 0.46m、Z方向に最大約3.48mの誤差が生じた。
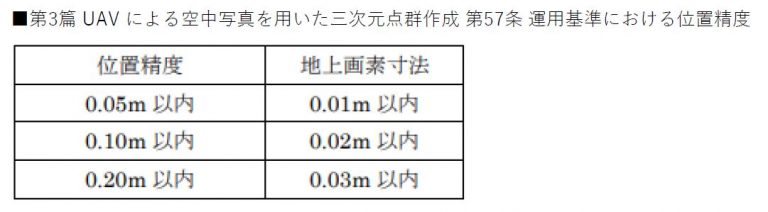
• 以上のことを踏まえ、KLAUを使用することで位置精度の向上を図る。目標とする精度は、「UAVを用いた公共測量マニュアル(案)」に記載されている、「地上分解能 3cm/pixelにおける位置精度誤差20cm以内」とする。
RedEdgeにKLAU PPKを使用することのメリット
• KLAU PPK(後処理方式高精度測位システム)とRedEdgeを組み合わせ撮影画像の位置精度を格段に向上させることで、以下の2点のメリットが期待できる
1.画像データの信用性の向上
位置精度が向上することで、圃場内の生育不足/異常個所を正確な座標で把握が可能。 さらに正確な座標のデータをもとに生育マップを生成することで、ドローンやトラクターなどの農薬散布機との連携がより精密なものとなる。
2.SfM処理データの多目的利用
位置精度の信用性が向上することで、SfM処理データを基に圃場面積算出/代搔き時の凹凸確認/植生の成長度合い(背丈)などの植生指数以外の用途にも、応用する事ができる。 以上のメリットを踏まえた上で精度検証を行った。
検証の詳細情報
■検証内容
写真計測を想定し、地上分解能4cm/pixelの高度で飛行させ、事前にGNSS測量を行った個所にGCPを設置し検証点として用いて測定値と比較した。※レンズキャリブレーション値は用いない。
■検証場所
京都府南丹市(約1ha)
■使用機材

機体:Inspire2
カメラ:Mica Sense RedEdge-MX/ DLS2*
ジンバル:Gen. 2 Quick Mount kit
KLAU PPKシステム:KLAU PPKアンテナ/Unit(7700B)
■PPK後処理ソフト
KLAU PPK J-Desktop
■SfMに使用したソフトウェア
Pix4DMapper(精度検証) *DLS2: 日射センサー兼GPSレシーバー
RedEdge-MXをKLAU仕様に変更
1. カメラ/Quick Mount接続ケーブル改造
RedEdgeは、通常のKLAU Unitと同様にカメラとGNSSを精密に同期させる必要がある。そのため、シャッター信号を抜き出せるようMountとカメラを繋ぐケーブルの改造が必要である。(下図1参照)
2. 専用アンテナスタンドの設置
RedEdgeのDLS2とKLAUアンテナを機体に設置するため専用のアンテナスタンドを取り付ける。(下図2参照)

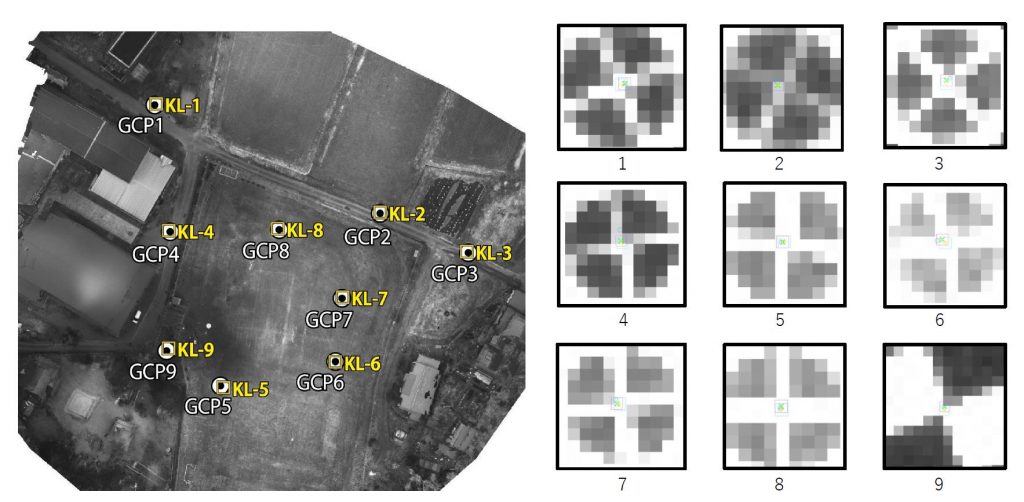
対空標識(GCP)の設置
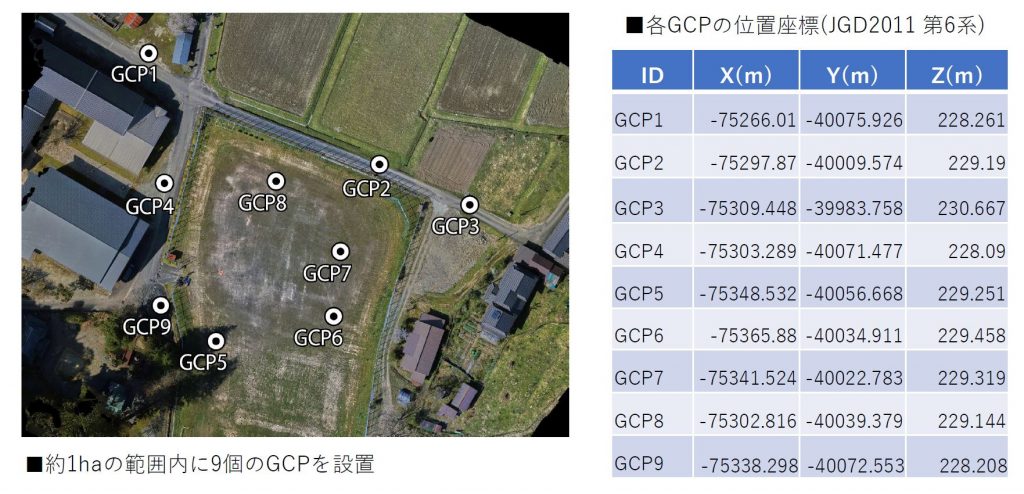
• 今回事前にGNSS測量を行った箇所(三級基準点)にGCPを設置各点の設置場所は下図のとおりである。
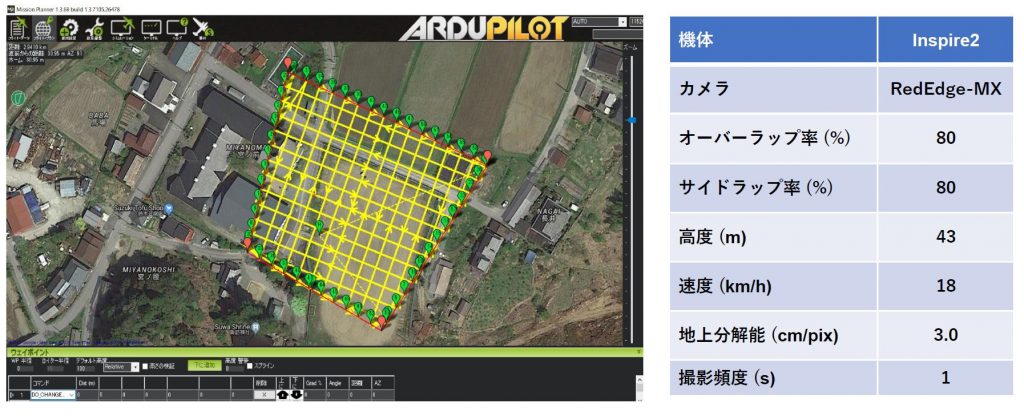
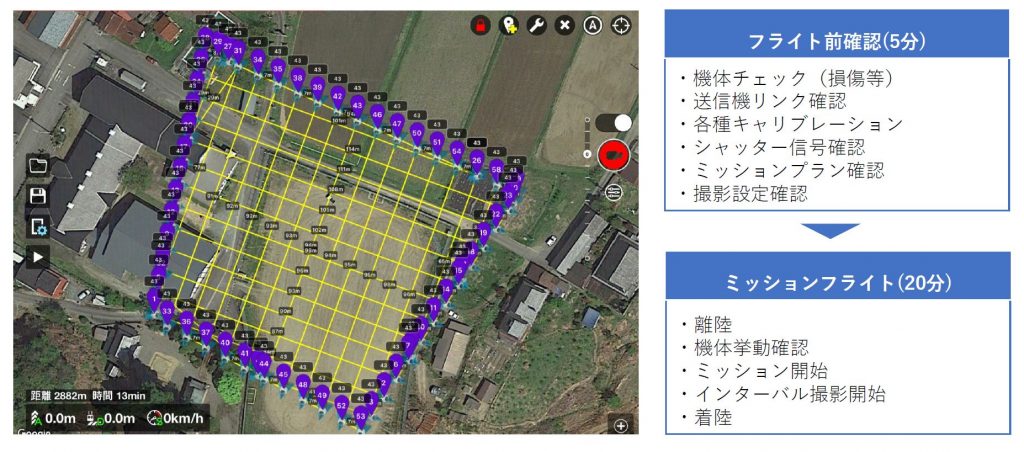
フライトプラン
• フライトプランの詳細は、表のとおりである。
• 今回グリッド飛行を採用し、地上分解能3cmを目標とした。
下図のMission Planner用いてフライトプランを作成。
飛行
下記作業フローに従って、Litchiを用いた自動航行を実施
• 1回のフライトで機体の動作確認・撮影設定をデータ取得を行う。
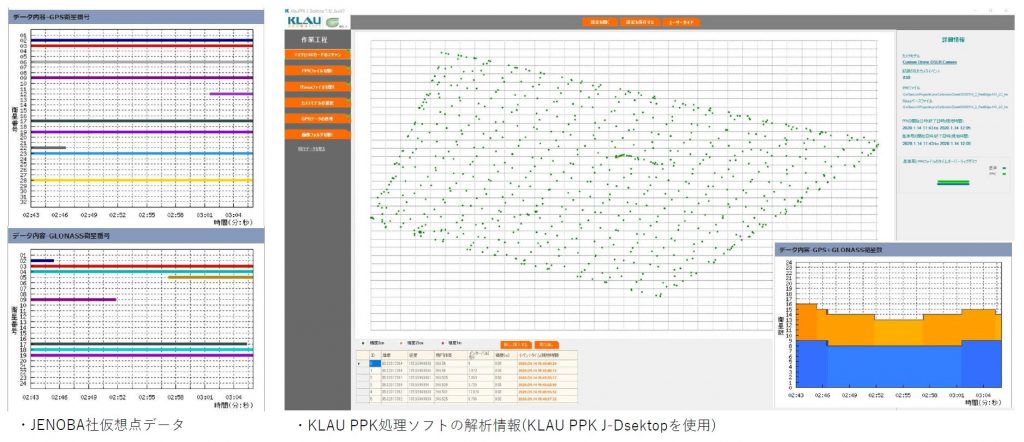
後処理
• 後処理補正には、KLAU PPK J-Dsektop を使用し、補正情報のダウンロードからアンテナ位置補正、測地系変換等の処理を行った。
• 下図より取得衛星数も十分であり、データ欠損も見られなかった。また、KLAU後処理ソフトによる解析結果も良好であることが確認できた。
オルソモザイク画像を用いた水平精度検証
• KLAUによる後処理結果を用いて、Pix4Dで3次元点群およびオルソモザイク画像を作成した。
各GCP設置点における水平誤差を目視で確認したところ、良好な結果であることが認められた。(下図参照)
KLAU PPKを用いた場合の水平及び垂直誤差
• 下表は、KLAU PPKによる後処理情報を使ってPix4Dによって処理した際のX、Y、Z値の較差を示した。
• 処理を行った段階でY方向に最大約3.8cm、Z方向に最大約-4.2cmの誤差が生じた。(下表参照)
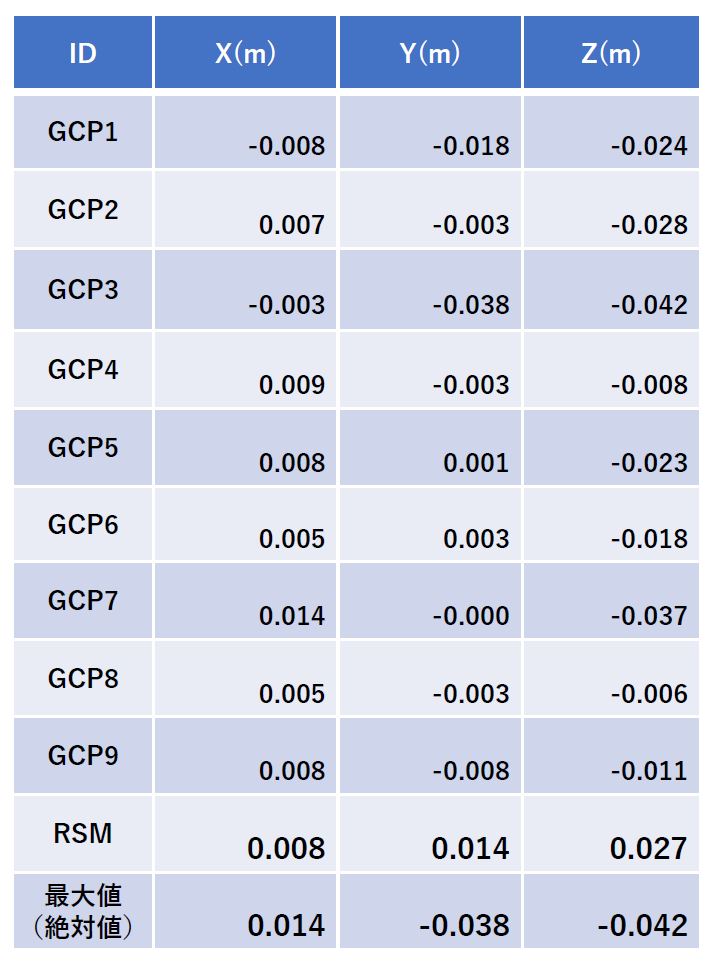
精度検証レポートの結論
• 地上分解能3cm/pxで精度誤差±5cm以内とDLS2(GPSレシーバー)のみでは得られない大幅な位置精度の向上が確認できた。